
- Тип техники
- Бренд
Просмотр инструкции телескопа Levenhuk SkyMatic 105 GT MAK, страница 16
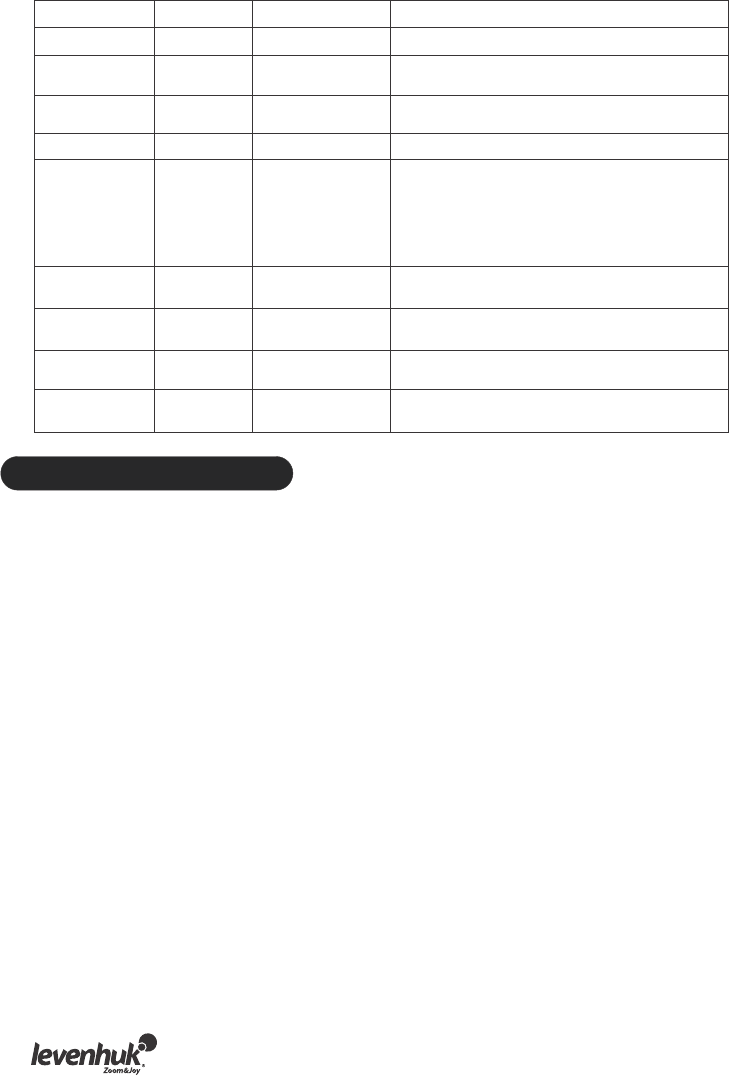
Get RA-Dec
E
34AB, 12CE#
The finderscope has to be aligned
Cancel Goto
M
#
Is Goto in
Progress
L
0# or 1#
0 = No, 1 = Yes. “0” is the ASCII zero character
Is Alignment
Complete
J
0# or 1#
0 = No, 1 = Yes
HC version
V
22
Two bytes represent Version 2.2
Stop/Start
Tracking
Tx x = 0
(tracking off)
x = 1 (Alt-Az
on) x = 2
(EQ-N) x = 3
(EQ-S)
#
Alt-Az tracking requires alignment
32-bit goto RA-
Dec
r34AB0500,1
2CE0500
#
32-bit get RA-
Dec
e
34AB0500,
12CE0500#
The last two characters should always be zero
32-bit goto Azm-
Alt
b34AB0500,1
2CE0500
#
32-bit get Azm-
Alt
z
34AB0500,
12CE0500#
The last two characters should always be zero
Additional commands
Setting the tracking rate via Rs232:
1. Multiply the required tracking rate (arcseconds/seconds) by 4. For instance, if you want to
track an object at 120 arcseconds/second (approx. 8 times more than sidereal rate), then
TRACKRATE should be 480.
2. Divide TRACKRATE into two bytes, so that TRACKRATE = TrackRateHighByte*256 +
TrackRateLowByte. E.g. if TRACKRATE = 480, then TrackRateHighByte = 1, TrackRateLowByte =
224.
3. To set the tracking rate, send the following 8-byte command:
a. Positive Az tracking: 80, 3, 16, 6, TrackRateHighByte, TrackRateLowByte, 0, 0
b. Negative Az tracking: 80, 3, 16, 7, TrackRateHighByte, TrackRateLowByte, 0, 0
c. Positive Alt tracking: 80, 3, 17, 6, TrackRateHighByte, TrackRateLowByte, 0, 0
d. Negative Alt tracking: 80, 3, 17, 7, TrackRateHighByte, TrackRateLowByte, 0, 0
4. Hand controller returns “35”.
Sending a slow-Goto command via Rs232:
1. Convert the angular position into a 24-bit number. E.g. if the desired angular position is 220°,
then POSITION_24BIT = (220/360)*224 = 10,252,743.
2. Divide POSITION_24BIT into three bytes, so that POSITION_24BIT = PosHighByte * 65536 +
PosMedByte *256 + PosLowByte. E.g. if POSITION_24BIT = 10,252,743, then PosHighByte = 156,
PosMedByte = 113, PosLowByte = 199.
3. Send the following 8-byte command:
a. Az slow Goto: 80, 4, 16, 23, PosHighByte, PosMedByte, PosLowByte, 0
b. Alt slow Goto: 80, 4, 17, 23, PosHighByte, PosMedByte, PosLowByte, 0
4. Hand controller returns “35”.
Resetting the Alt and Az positions
14
Ваш отзыв будет первым